高德开源全球首个机器人“通用大脑”ABot-M0,效率提升30%!
创始人
2026-04-01 15:43:21
0次
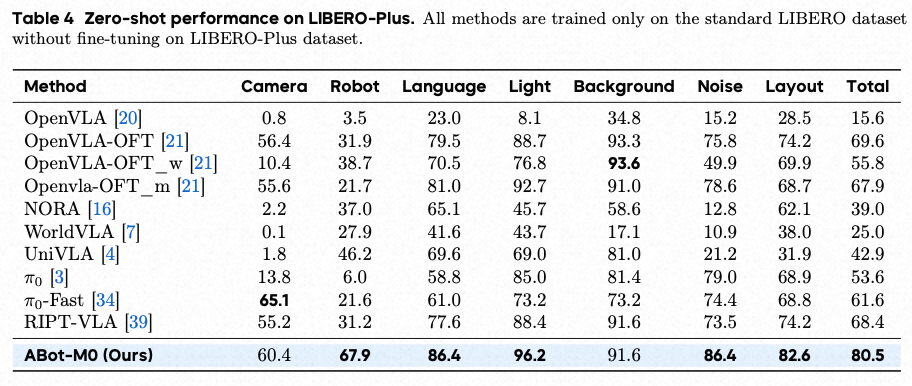
4月1日,高德宣布全量开源ABot-M0,这是全球首个基于统一架构的机器人具身操作基座模型,能够实现一个“通用大脑”适配多种形态的具身机器人。ABot-M0在Libero、Libero-Plus、RoboCasa等多个权威基准测试中达到SOTA(State of the Art),特别是在Libero-Plus基准上,任务成功率高达80.5%,相较于业界标杆方案Pi0提升了近30%。
ABot-M0的开源覆盖了数据、算法与模型三大维度,旨在打破数据孤岛和部署难点,为具身智能领域提供前沿的空间理解能力以及“开箱即用”的通用技术基座。数据层面,ABot-M0开源了规模最大的通用机器人数据集UniACT,整合超过600万条真实操作轨迹,并提供全流程处理管线。算法层面,ABot-M0开源了模型架构与训练框架,包括高德创新提出的动作流形学习(AML)算法与双流感知架构。模型层面,ABot-M0开源了端到端的预训练模型与完整工具链,使开发者能够快速适配工业、家庭等场景。统一架构验证了“一个大脑驱动多种形态”的可行性,为“通用大脑+专用躯体”的产业标准形成提供了实证支撑。

相关内容
热门资讯
已致6死 德国北部枪击事件可能...
德国警方29日说,德国北部施塔德当天发生的枪击事件已造成6人死亡。据称,该事件可能与家庭矛盾有关。警...
强对流天气蓝色预警:陕西山西等...
央视网消息:中央气象台6月30日06时继续发布强对流天气蓝色预警,预计6月30日08时至7月1日08...
防癌医疗险能“补缺” 保障责任...
在人口老龄化加速、癌症发病率攀升的背景下,防癌医疗险备受关注。近年来,广州推出的商业健康保险产品持续...
广州对“偷面积”开出首张公开罚...
文、图、视频/羊城晚报全媒体记者 江皓轩广州市荔湾区城管执法局近日对力诚榕诚湾项目开出首张“偷面积”...
新华社访谈|在新疆,播种“梦的...
新疆巴音郭楞蒙古自治州,3000亩棉田边,艾海鹏和凌磊用手机屏幕操控着远处的无人机。飞机从棉田上方掠...
上海一高校老师发表为什么导师喜...
连日来,一篇名为《为什么导师喜欢娶自己的博士》的论文截图在网上流传开来,引发热议,第一作者署名为单福...
习近平会见白俄罗斯总统卢卡申科
6月29日上午,国家主席习近平在北京钓鱼台国宾馆会见白俄罗斯总统卢卡申科。新华社记者 申宏 摄新华社...
扛着冰箱陪“公主”参赛,省运会...
第十七届广东省运会群众赛事活动桨板比赛,这个周末在清远阳山连江河段开桨。江面百板竞发,两岸人声鼎沸。...
“AI+机器人”把关高危工作,...
文/羊城晚报全媒体记者 梁怿韬 通讯员 成广聚 陈梓佳图/通讯员提供市民丢弃的生活垃圾,最终将运至终...
师生专享多重优惠!广州从化集结...
考完试,赴一场夏日清凉之旅!为回馈2026届全国中高考毕业生、在从高校学子以及全体人民教师,广州从化...