华为智驾系统警示:浓雾超速酿事故,智能辅助驾驶需谨慎
创始人
2026-03-05 10:14:57
0次
3月4日,华为智能汽车解决方案BU CEO靳玉志在鸿蒙智行技术焕新发布会上,回应了春节期间安徽浓雾路段事故。他指出,在乾坤智驾辅助驾驶状态下,车辆已将车速降至60公里/小时,但驾驶员因肉眼看不清而将车速调至超过100公里/小时,导致在浓雾中追尾。靳玉志强调,毫米波雷达已达到探测极限,而驾驶员超速行驶增加了风险。
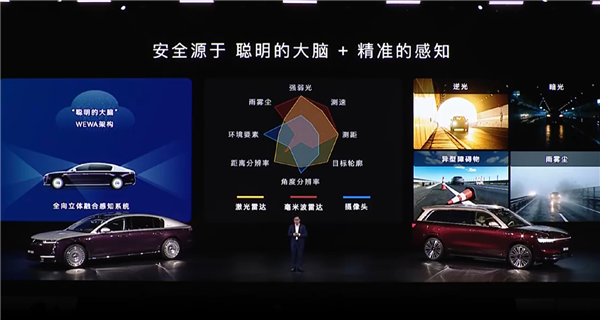
靳玉志还展示了不同传感器的特点,解释了激光雷达、毫米波雷达和视觉摄像头在不同场景下的优势。摄像头虽能还原人眼所见,但在逆光、夜晚、雨雾天易误判。毫米波雷达不受光影响,探测能力稳定,但无法探测高度。4D毫米波雷达增加了对高度的探测,但仍无法判断障碍物形状。激光雷达通过发射激光束形成三维点云,识别精度高,但穿透力不如毫米波雷达,也无法采集色彩和亮度信息。因此,摄像头、4D毫米波雷达、激光雷达需相辅相成、协同工作,集成三者的融合感知方案才能无惧恶劣天气,测距测速更准确。

相关内容
热门资讯
已致6死 德国北部枪击事件可能...
德国警方29日说,德国北部施塔德当天发生的枪击事件已造成6人死亡。据称,该事件可能与家庭矛盾有关。警...
强对流天气蓝色预警:陕西山西等...
央视网消息:中央气象台6月30日06时继续发布强对流天气蓝色预警,预计6月30日08时至7月1日08...
防癌医疗险能“补缺” 保障责任...
在人口老龄化加速、癌症发病率攀升的背景下,防癌医疗险备受关注。近年来,广州推出的商业健康保险产品持续...
广州对“偷面积”开出首张公开罚...
文、图、视频/羊城晚报全媒体记者 江皓轩广州市荔湾区城管执法局近日对力诚榕诚湾项目开出首张“偷面积”...
新华社访谈|在新疆,播种“梦的...
新疆巴音郭楞蒙古自治州,3000亩棉田边,艾海鹏和凌磊用手机屏幕操控着远处的无人机。飞机从棉田上方掠...
上海一高校老师发表为什么导师喜...
连日来,一篇名为《为什么导师喜欢娶自己的博士》的论文截图在网上流传开来,引发热议,第一作者署名为单福...
习近平会见白俄罗斯总统卢卡申科
6月29日上午,国家主席习近平在北京钓鱼台国宾馆会见白俄罗斯总统卢卡申科。新华社记者 申宏 摄新华社...
扛着冰箱陪“公主”参赛,省运会...
第十七届广东省运会群众赛事活动桨板比赛,这个周末在清远阳山连江河段开桨。江面百板竞发,两岸人声鼎沸。...
“AI+机器人”把关高危工作,...
文/羊城晚报全媒体记者 梁怿韬 通讯员 成广聚 陈梓佳图/通讯员提供市民丢弃的生活垃圾,最终将运至终...
师生专享多重优惠!广州从化集结...
考完试,赴一场夏日清凉之旅!为回馈2026届全国中高考毕业生、在从高校学子以及全体人民教师,广州从化...