小米OneVL框架开源!自动驾驶推理速度精度双突破
创始人
2026-05-13 17:41:32
0次
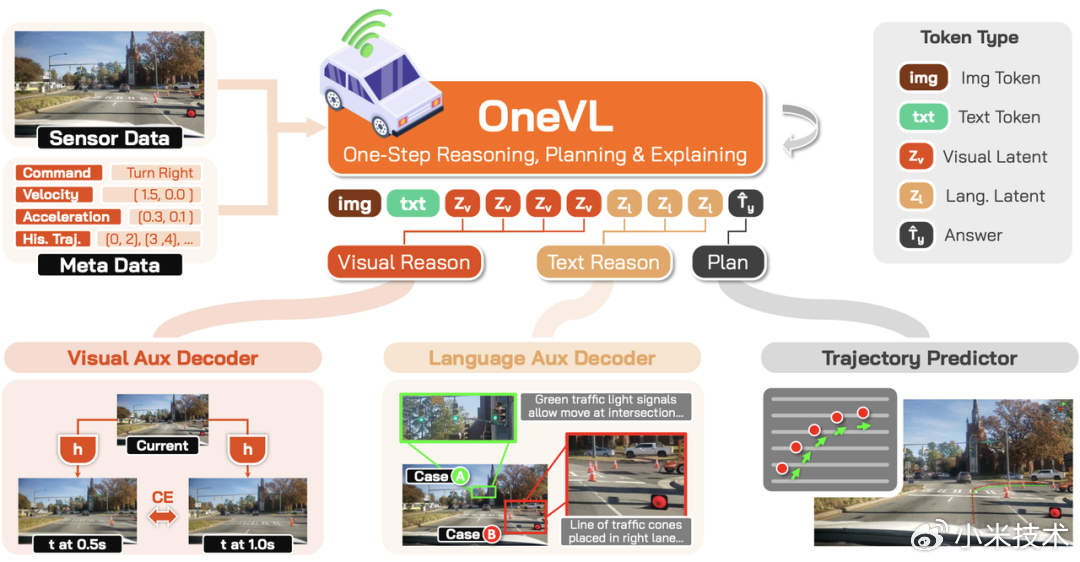
5月13日,小米技术宣布正式发布并开源了XiaomiOneVL一步式潜空间语言视觉推理框架。这一模型在行业内首次实现了VLA、世界模型、潜空间推理等多个技术路线的统一,不仅提升了推理的速度和精度,还在精度上超越了显式CoT,在速度上与“仅答案”预测的潜空间CoT方案对齐。
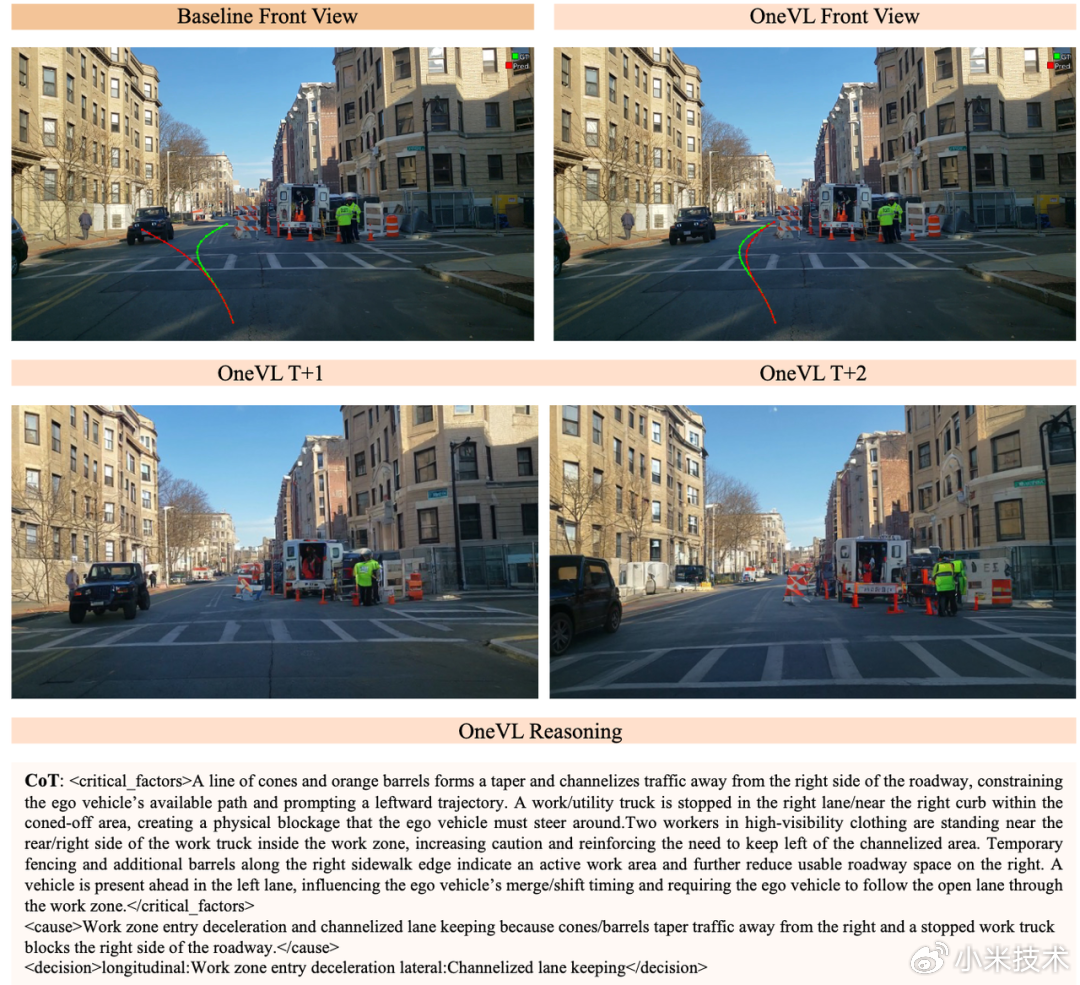
XiaomiOneVL通过潜空间推理,将VLA和世界模型这两条自动驾驶领域的独立技术路线统一到同一套框架中。该框架在感知、推理与规划的多个主流基准上刷新了潜在推理方法的性能上限,在ROADWork、Impromptu、Alpamayo-R1三项基准上均达到SOTA,并在NAVSIM上取得了优越性能。此外,XiaomiOneVL还能为模型决策提供语言和视觉双维度的可解释性,既能用文字说明“为什么这样开”,也能用预测画面展示“接下来会发生什么”。
小米已将XiaomiOneVL的模型权重和训练、推理代码全面开源,技术报告、项目主页和开源代码的链接已提供,以供业界参考和使用。

相关内容
热门资讯
新华社访谈|在新疆,播种“梦的...
新疆巴音郭楞蒙古自治州,3000亩棉田边,艾海鹏和凌磊用手机屏幕操控着远处的无人机。飞机从棉田上方掠...
上海一高校老师发表为什么导师喜...
连日来,一篇名为《为什么导师喜欢娶自己的博士》的论文截图在网上流传开来,引发热议,第一作者署名为单福...
习近平会见白俄罗斯总统卢卡申科
6月29日上午,国家主席习近平在北京钓鱼台国宾馆会见白俄罗斯总统卢卡申科。新华社记者 申宏 摄新华社...
扛着冰箱陪“公主”参赛,省运会...
第十七届广东省运会群众赛事活动桨板比赛,这个周末在清远阳山连江河段开桨。江面百板竞发,两岸人声鼎沸。...
“AI+机器人”把关高危工作,...
文/羊城晚报全媒体记者 梁怿韬 通讯员 成广聚 陈梓佳图/通讯员提供市民丢弃的生活垃圾,最终将运至终...
师生专享多重优惠!广州从化集结...
考完试,赴一场夏日清凉之旅!为回馈2026届全国中高考毕业生、在从高校学子以及全体人民教师,广州从化...
4人偷完手机对监控比“耶”,广...
文、视频/羊城晚报全媒体记者 张璐瑶记者6月29日从广东省公安厅了解到,近日,东莞警方抓获4名涉嫌盗...
追寻孙中山先生足迹 感受大湾区...
统筹/蒋铮 文/羊城晚报全媒体记者 刘泳希 王瑜瑛今年是孙中山先生诞辰160周年。6月25日至29...
广州华立学院禁止小米汽车入校?...
近日,“广州华立学院禁止小米汽车入校”的网络传闻引发广泛社会热议。针对该舆情,6月28日23时30分...
曾护送3万只羊来华 蒙古国军官...
近日,在贵州遵义探寻红军长征足迹的蒙古国军官策德夫·尼亚木巴亚尔,拿起毛笔在宣纸上写下“团结”一词。...