微软发布Rho-alpha AI模型,机器人自主性革命来袭
创始人
2026-01-22 15:28:56
0次
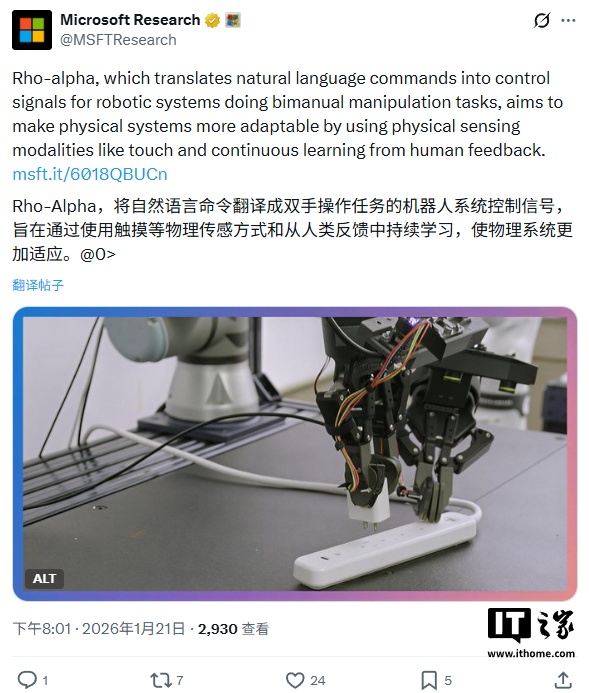
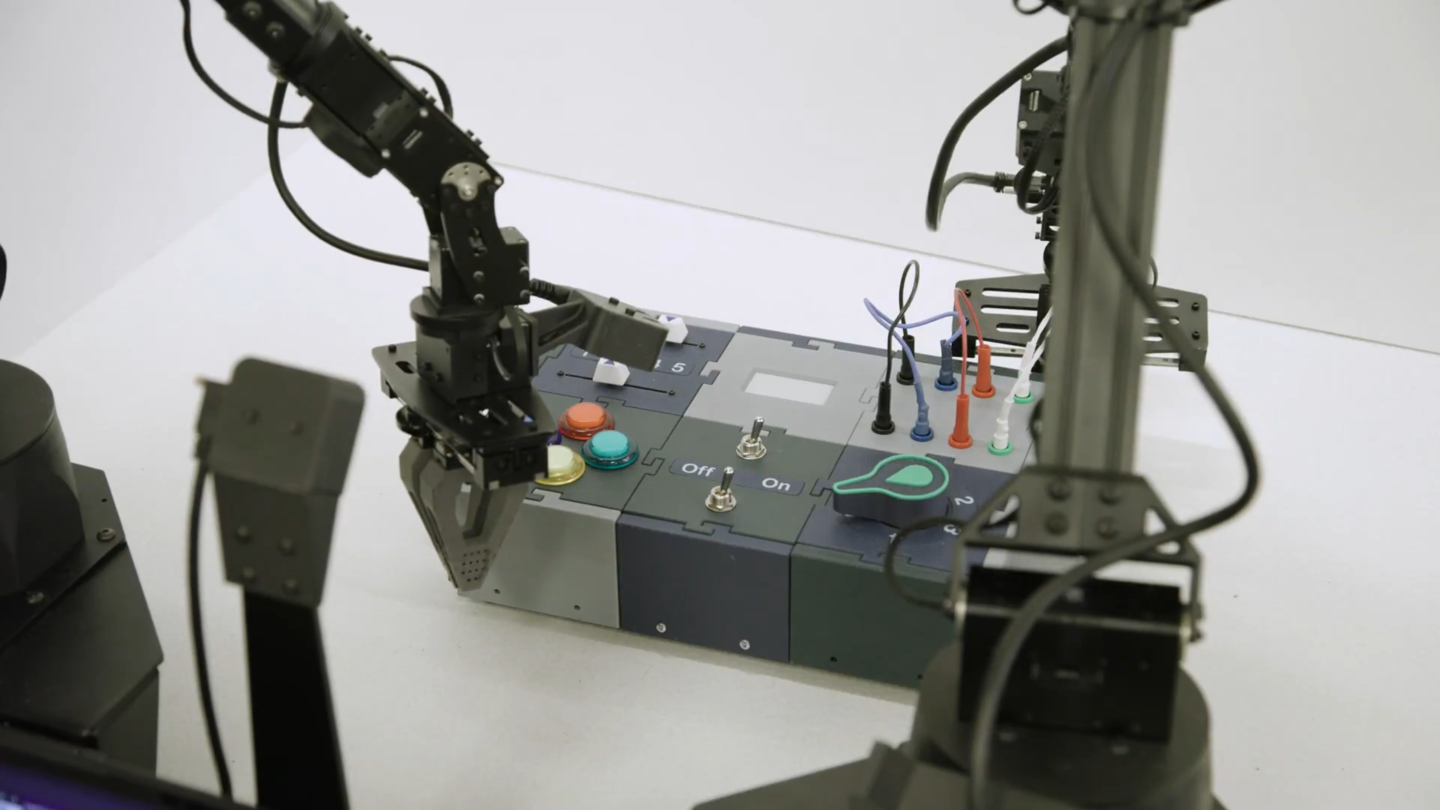
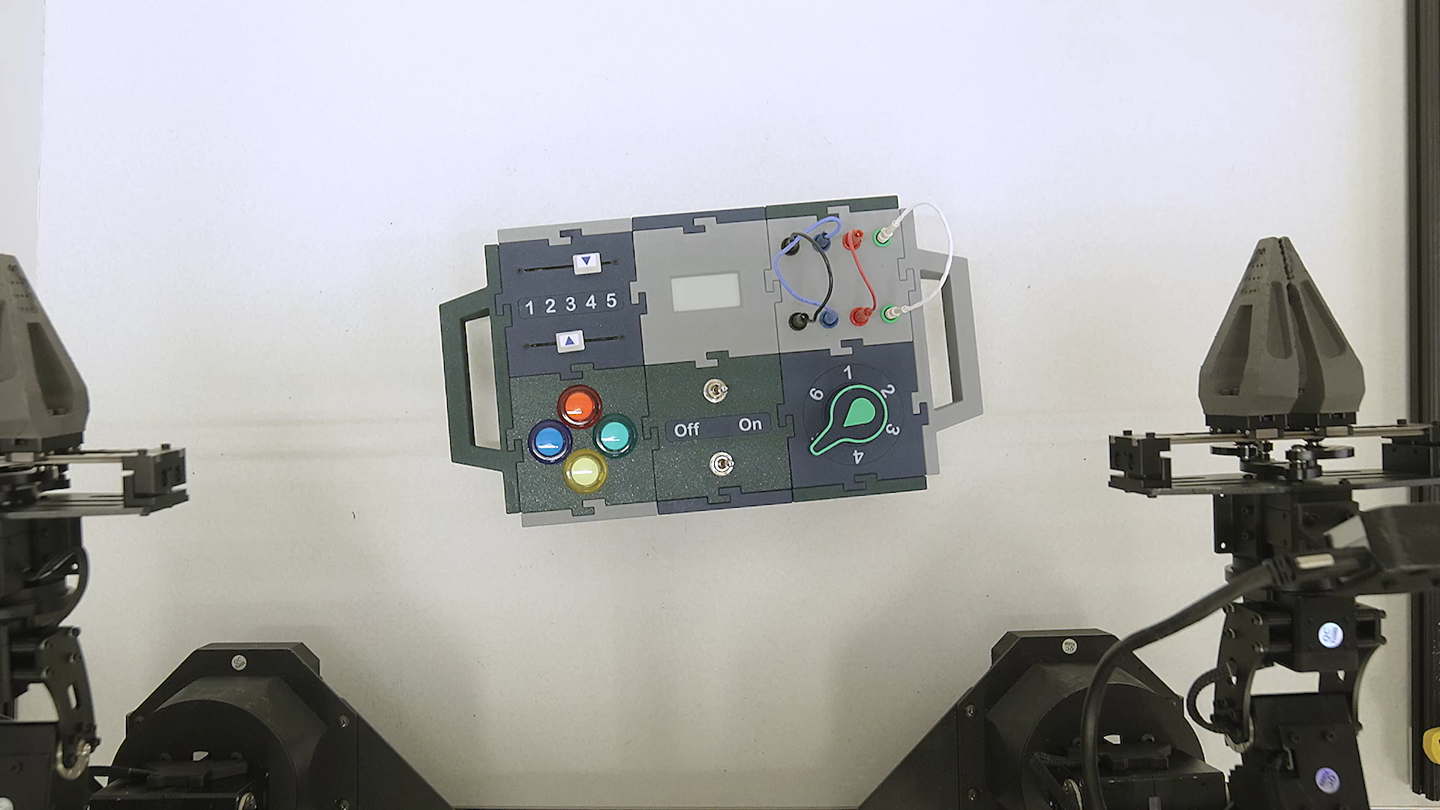
1月22日,微软宣布推出一款名为Rho-alpha的新型AI模型,专为机器人领域设计,旨在使机器人能够在更复杂、不可预测的真实世界中执行任务。Rho-alpha由微软研究院开发,是微软基于Phi视觉-语言模型家族,首次为机器人应用打造的系统。该模型的核心能力是将自然语言指令直接转化为机器人控制信号,使机器人能够完成复杂的双手协同操作任务,无需依赖传统工业机器人的固定脚本和预设流程。
Rho-alpha不仅属于视觉-语言-行动模型的范畴,还引入了触觉感知能力,使机器人可以根据触觉反馈实时调整动作。微软表示,未来版本还将加入力感知等更多传感模态,以提升操作精度和安全性。此外,Rho-alpha具有适应性,能够在运行过程中动态调整行为,而非完全依赖预训练结果。当机器人出现操作失误时,人类操作者可以通过3D输入设备等直观工具进行干预,系统会将这些纠正反馈纳入学习过程。
在数据层面,微软试图解决机器人领域长期存在的训练数据不足问题。Rho-alpha采用了真实机器人演示、仿真任务以及大规模视觉问答数据相结合的训练方式。大量合成数据通过运行在Azure基础设施上的机器人仿真和强化学习流水线生成,再与商业及开放数据集中的真实机器人数据融合使用。微软计划通过研究型早期访问计划向外部开放Rho-alpha,并在未来提供更广泛的使用渠道。
相关内容
热门资讯
零跑B01/B10新车型亮相:...
今日,零跑汽车对外公布了全新B01/B10座舱的官方图片以及部分配置信息。这两款车型分别定位为“年轻...
比亚迪方程豹豹5三周年特别版车...
7月4日,比亚迪集团方程豹事业部总经理熊甜波宣布,为庆祝方程豹豹5定名三周年,特别版车衣已在方程豹汽...
华为鸿蒙智行问界M9销量破30...
7月4日,华为终端BG CEO何刚宣布,鸿蒙智行问界M9全系累计交付量已突破30万台,其中全新一代问...
美国乡村居民担忧AI数据中心建...
近日,美国乡村地区成为AI数据中心建设的新焦点。据加德纳食品与农业政策调查,乡村居民对AI数据中心可...
特斯拉三车霸榜!三年保值率超六...
7月4日,中国汽车流通协会和精真估联合发布了《2026年6月中国汽车保值率研究报告》。报告显示,在三...
奇瑞汽车南非罗斯林工厂启动,中...
7月4日,奇瑞汽车在南非比勒陀利亚的罗斯林工厂正式启动运营,标志着中国车企在非洲大陆的首座全资整车制...
俄罗斯燃油危机催生中国电动车销...
近日,乌克兰对俄能源基础设施的打击导致俄罗斯汽油和柴油供应紧张,部分地区零售汽油价格攀升至欧洲最高水...
宝马iX7谍照曝光:纯电旗舰S...
近日,德国豪华品牌宝马宣布将在2027年推出换代X7,并首次带来纯电版iX7。iX7将延续全新iX5...
有一种爱,叫做归来
75年前的一块红绸,牵出一段“又暖又燃”的往事。1949年11月,12架飞机从香港起飞,北上京津,被...
广东海警局:海上作业船舶请及时...
文、图/羊城晚报全媒体记者 侯梦菲 通讯员 吴卡 胡维文 陈新元视频/广东海警局今年第10号台风“美...